E(2)-Equivariant Graph Planning for Navigation
Abstract
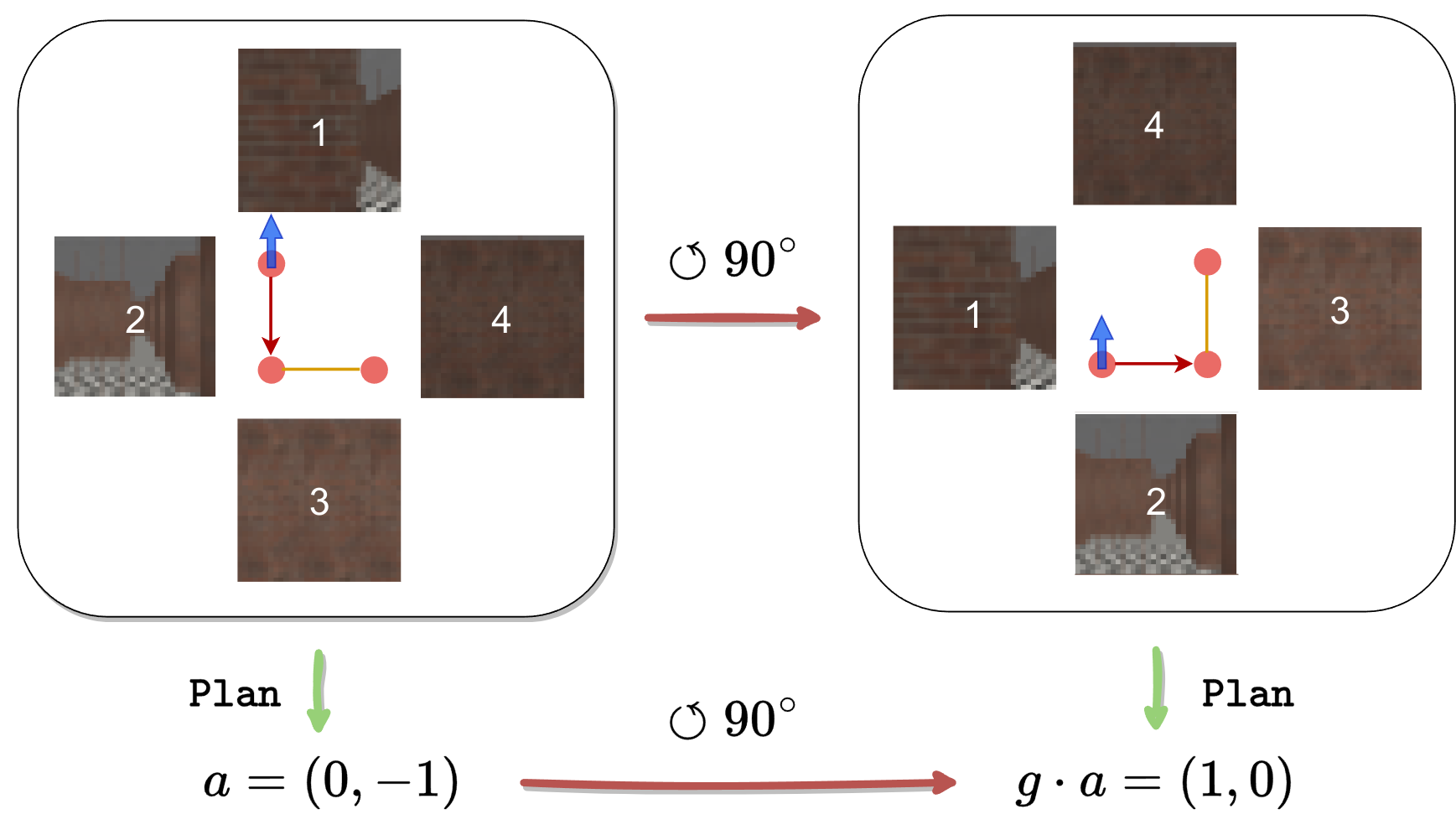
Learning for robot navigation presents a critical and challenging task. The scarcity and costliness of real-world datasets necessitate efficient learning approaches. In this letter, we exploit Euclidean symmetry in planning for 2D navigation, which originates from Euclidean transformations between reference frames and enables parameter sharing. To address the challenges of unstructured environments, we formulate the navigation problem as planning on a geometric graph and develop an equivariant message passing network to perform value iteration. Furthermore, to handle multi-camera input, we propose a learnable equivariant layer to lift features to a desired space. We conduct comprehensive evaluations across five diverse tasks encompassing structured and unstructured environments, along with maps of known and unknown, given point goals or semantic goals. Our experiments confirm the substantial benefits on training efficiency, stability, and generalization.
Methodology
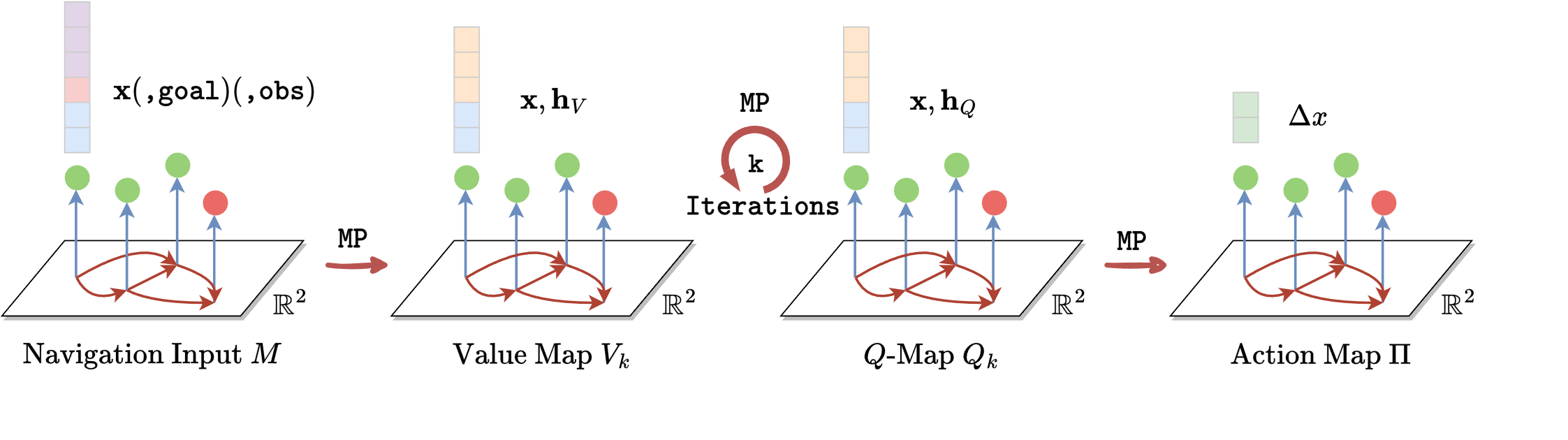
Messsage Passing Value Iteration Network (MP-VIN)
We generalize value iteration to graphs
- Value iteration involves integral over next states
- The integral is over the 2D plane, which can be written as a convolution
- The kernel can be proved to satisfy G-steerable kernel constraint
- We construct a graph by sampling finite points
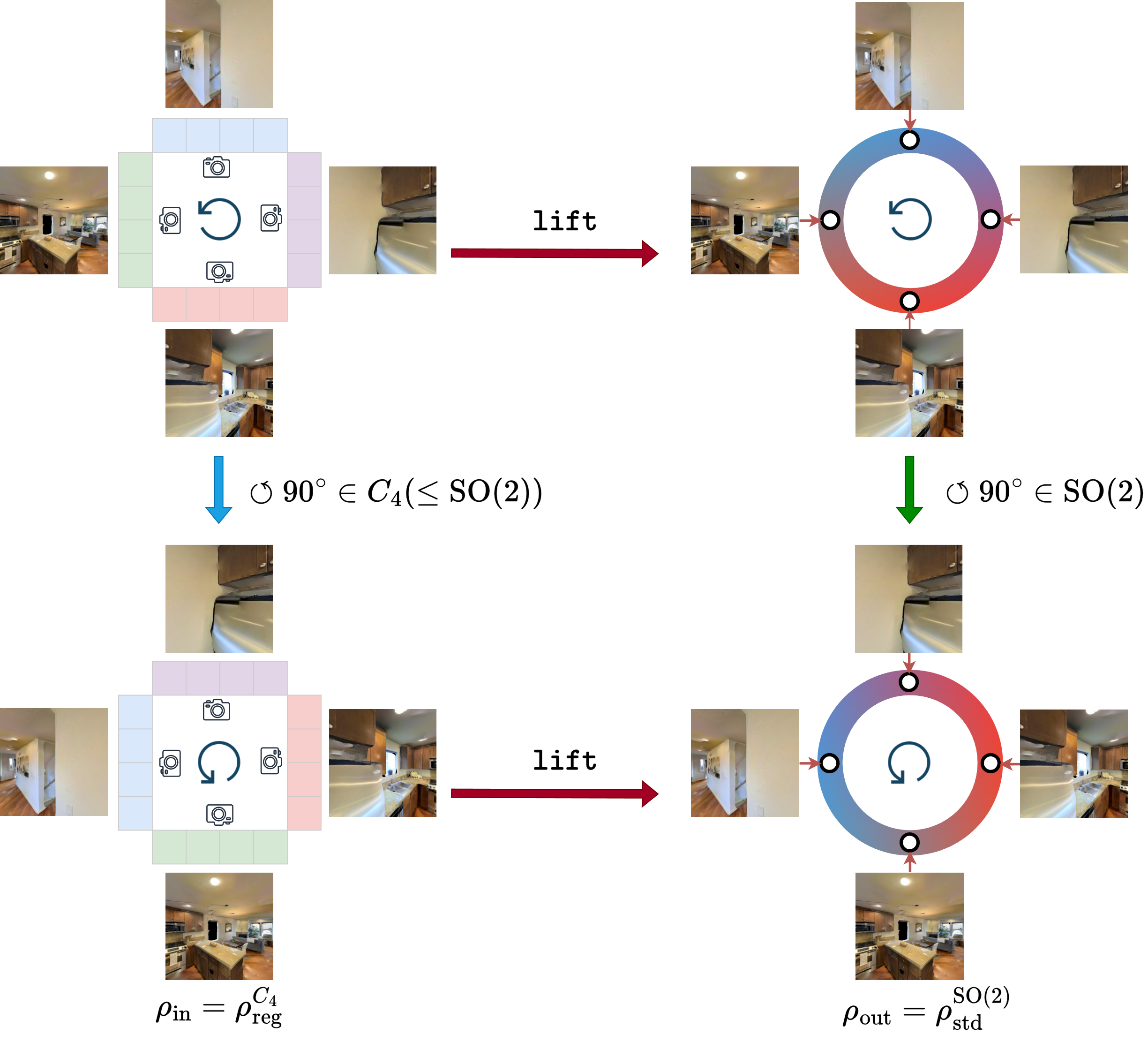
Lifting Layer
One challenge in learning graph planner from finite camera views: The robot's finite camera views cannot be continuously rotated with robot, which has infinite symmetry SO(2). How to obtain SO(2)-transformable feature maps? We proposed an equivariant lifting layer to map the images over finite camera view onto features over SO(2)
BibTeX
@article{zhao2024e2,
author={Zhao, Linfeng and Li, Hongyu and Padır, Taşkın and Jiang, Huaizu and Wong, Lawson L.S.},
journal={IEEE Robotics and Automation Letters},
title={$\mathrm{E}(2)$-Equivariant Graph Planning for Navigation},
year={2024},
volume={9},
number={4},
pages={3371 - 3378},
keywords={Navigation;Planning;Task analysis;Robots;Cameras;Visualization;Message passing;Integrated planning and learning;deep learning methods;vision-based navigation},
doi={10.1109/LRA.2024.3360011}
}